人机互助的过程中,机械臂对人本身有那些影响?
人机互助机械臂应保证其能够在非结构化且部分未知的环境中运行,与人类用户共享工作空间,可处理不可避免或故意碰撞的情况。人机互助机械臂最本质要求为友好性与安全性,其直接推动碰撞检测技术的需求和发展,但现有碰撞检测技术中存在非线性扰动因素导致检测不稳定甚至出现检测错误的问题,直接影响人机互助作业性能。
传统工业机械臂通常工作在与操作者隔离的结构化环境中,设计时主要考虑机械臂作业的速度与精度,而与操作者合作互助的能力未被开发,通用性较差,具有诸多作业环境的限制。为了使机械臂更智能的应用于生产生活,人机互助机械臂因具备安全性、灵巧性及友好人机交互性等诸多优势备受重视,其集成了先进的交互功能。

可在非结构化作业环境中与操作人员进行交互,与人类协同构建共存环境中人机共融作业模式。人机互助机械臂作业在以人为本的环境中,任何公共场所下人机互助作业都必须要求机械臂对人类是友好的且工作是可靠的。
目前人机互助机械臂的应用范围逐渐延伸,涉及从军用民用工业环境到家庭服务、医疗救援等各行各业,现代化、高度自动化的工厂变得越来越复杂,典型应用包括面向军用领域高价值卫星人机互助装配与民用领域重复作业人机互助生产。

主要解决军用领域高价值卫星零部件装配种类多、工作空间狭小、劳动强度大问题与民用领域机器人关节生产工艺流程复杂、精度要求高等问题。那么人机互助的过程中,机械臂对人本身有那些影响?
一、人机互助机械臂发展
人机互助已被认为是许多应用领域中未来机器人的关键要素,例如制造,运输,服务和娱乐,这些应用带来了巨大的社会和经济影响。可以预见,未来的机械臂将像人类的双臂一样发挥作用,它们是独立自主的实体,并具有丰富的意识和判断能力,可以自行决策,与物理世界互动的智能执行器。
它们将作为人类的多功能助手,成为人类生产生活中不可或缺的一部分。双臂协作机器人,其设计平衡了安全与柔性生产的需求,能够在生产中协助工作人员完成大量的重复枯燥的劳动,机械臂从事生产车间的流水线作业,可将人类转移到更高级的技能岗位上;机械臂协助工作人员组装精密复杂零部件,可使人类专注关键技术研究。

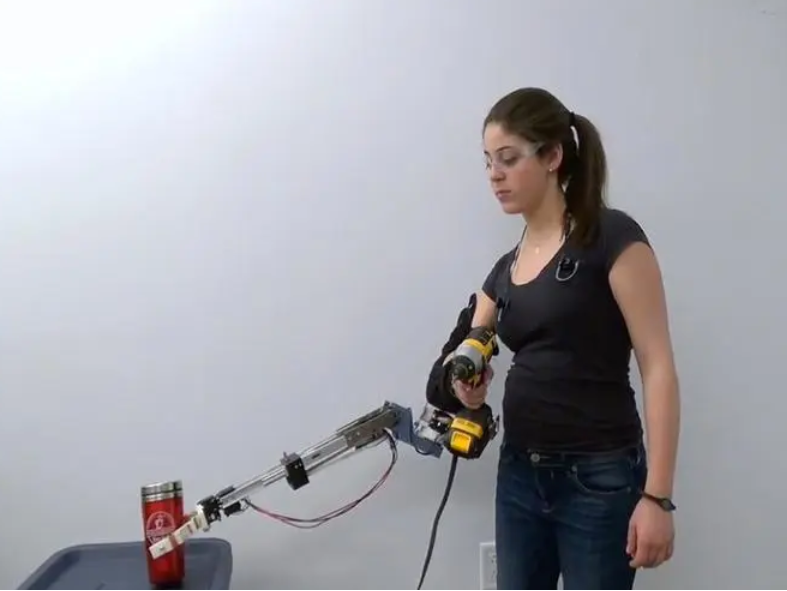
机械臂可与工作人员占据相同的工作空间,当机械臂感受到意外的碰撞,将立即暂停运动,此外,其镁质骨架上覆盖着柔软的圆弧状填充物,可以极大地减轻撞击伤害,确保安全时也可轻易使其继续完成工作。受人类使用工具及与环境交互多功能性的启发,开发了可通过调整
前馈力和阻抗来估计与未知环境的相互作用力的控制器,通过自动调整其运动轨迹以适应刚性环境并维持所需的相互作用力,从而补偿了相互作用力和运动轨迹的不稳定性,在机械臂末端上安装了刀具或钻头,切割、钻孔及触觉探测等具有代表性的交互任务。

以测试该控制器在未知工作环境下交互产生的阻抗与前馈力适应性,证明其开发控制器的性能。数据和视觉数据结合,开发了一种力控制和视觉控制的混合控制器,该控制器用于双臂机器人与人类搭档一同处理桌布。
二、辅助机械臂碰撞分析
不同于在结构化和确定性环境中工作的传统机械臂,人机互助机械臂需要在高度非结构化和高随机性环境中运行,如何确保人机互助机械臂在动态不确定环境中高效安全地运行成为研究重点。碰撞检测技术是解决人机交互的安全问题重要途径。

国际标准化组织提出了有关人机互助机械臂安全的相关技术标准,其中包括安全规范,风险评估等,人机互助机械臂应用中必须符合安全性ISO15066的标准,要求机械臂在人类存在于危险工作范围内时减速或停止运动,以最大程度地减少人机交互中碰撞引起的潜在风险。
当机械臂在非结构化环境中运行时,工作空间中的不确定性会导致人机意外碰撞。具有安全性和灵活性的人机互助机械臂可以检测每个关节的碰撞扭矩并对碰撞做出反应。在不可预测的环境中优化人机碰撞检测是人机互助机械臂面临的最关键和紧迫的问题。

传统的人机互助机械臂的碰撞检测设计常采用安装外部传感器的方案,能够提供精确的关节力矩信息的关节力矩传感器与能够提供末端执行器所受的空间六维力分量的六维力传感器,通过外部传感器能够准确的获得机械臂的受力情况,很好的保证了人机互助作业的安全,使得碰撞检测能够应用在更复杂的场合。
关节力矩传感器安装在机械臂关节上,通常根据关节中运动部件的变形计算扭矩,KUKALWR机械臂使用关节力矩传感器,优点是可以检测施加在每个关节上的力,但关节设计复杂化导致成本增加。六维力传感器通常安装在机械臂末端,适用于需要高精度作业的力控制。

多种带有关节力矩传感器的机械臂为研究对象,实现了较精确的碰撞检测,验证了基于广义动量构造外力矩观测器进行碰撞检测。在此研究基础上,他们还基于采集的关节力矩信息,研究了弹性能量存储和释放对于篮球运球的主要作用,进一步分析能量特性改进控制器,达到稳定平移和旋转的动态循环。
为可靠地在线估算接触点处的接触力,建立了基于动量的残差生成器以构建虚拟力传感器。通过深度图像信息定位接触点位置,关节力矩信息可精确估计机械臂与人的碰撞位置与碰撞力的大小,实验验证所提出方案能够实现检测机械臂任何位置可能发生的接触碰撞。

增加关节力矩传感器的方案具有增加机械臂关节设计复杂性以及限制机械臂性能等弊端,同时增加了机器人开发制造的成本;而六维力传感器的价格昂贵,且因其只能检测末端碰撞很少被用于实时检测碰撞的研究。
相比较之下,基于无传感器的碰撞检测方案由于未改变机器人的结构设计,对机械臂的性能基本无影响,被广泛应用于不需要高精度的服务型应用开发。现有的研究大都根据计算模型与关节电流等信息构造虚拟力传感器,进而对机械臂碰撞力矩进行估计。

虚拟力传感器的研究主要分为位置虚拟传感器与电流虚拟传感器,前者可以比较位置和速度的变化估计电机产生的外部力矩,后者通过测量电流变化计算外部力矩。虚拟力传感器模型作为接触力观测器,根据电机电流和系统模型的计算误差可估算关节外力矩,进而估算机械臂末端接触力矩。
在伺服控制器中引入了扭矩饱和限制器,基于估计的外力,能够在不涉及过多参数下实时测量并更改关节扭矩输出,进而调整机械臂的系统刚度,实现机械臂的安全碰撞检测和低精度力控制,提高了机械臂在人机交互中使用的安全性。

区分预期接触与非预期碰撞的区分检测算法,基于广义动量建立了虚拟传感器,只需采样关节电机驱动电流和位置信息即可,在该虚拟传感器中设计了两个具有低通和带通滤波特性的观测器,可实时检测到不同的力信号。
由于接触力与碰撞力频率分布和信号轻重不同,可根据关节力矩传感器的数据观测外力变化的速度,检测并区分人机间的互动是接触还是碰撞,是预期的还是非预期的,虚拟传感器可用于人机交互中的碰撞检测和区分,能够确保人员安全并提高交互性能。

基于深度学习方法的实时碰撞检测方法,设计了一个深度神经网络模型学习机器人碰撞信号并识别碰撞发生,其对模型不确定性和传感器噪声非常不敏感,它能够提取并接受来自机械臂关节的高维信号作为输入,以实现对碰撞的高敏感性和对误报警的低敏感性。
基于6自由度工业协作机器人进行了各种实验,实现了比传统碰撞检测方法更高的碰撞检测精度,结果验证了基于神经网络的碰撞检测方案不仅对碰撞具有很高的敏感性,而且对由噪声信号和模型不确定性引起的假阳性检测具有很高的鲁棒性。

三、互助机械臂性能
人机互助机械臂关节力矩信息的精确度决定机械臂碰撞检测的稳定性,在无外力矩传感器的方案中,由电流值所求解的关节力矩为机械臂关节所受到的总力矩,其中包含了一系列非线性扰动因素的影响,从中求取机械臂驱动力矩需对扰动因素进行分析。
机械臂关节在高负载持久运动情况下会导致关节温度上升,使机械臂的关节性能发生改变。改进摩擦模型作为控制系统的前馈补偿,并基于实验室自主研发的六自由度工业机械臂设计了实验,对比了常规模型与改进模型的补偿效果,结果证明了温度影响是对机械臂关节力矩干扰的重要因素。

机械臂关节非线性扰动因素中,除上述温度与间隙的影响外,摩擦也是其重要组成部分。基于摩擦现象研究,在动力学辨识过程中附加库伦与粘滞摩擦模型是当前研究摩擦力的主要方法,广义动量的虚拟传感器来估计电机侧与连杆侧的摩擦力矩,并在摩擦补偿后可改善控制器的轨迹跟踪性能。
基于神经网络改进了非线性干扰观测器,通过关节控制器补偿了估计的摩擦转矩,用于机器人碰撞检测以获得更好的碰撞检测性能,进行了六自由度机械臂仿真和两个单关节机械臂实验,验证了所提出研究方案对估计关节摩擦力和提高关节控制器性能的有效性。

结语:
为了使人机互助机械臂能够与人类共享工作空间并进行交互,需要快速可靠地检测机械臂结构上可能发生的碰撞,制定控制策略以确保碰撞后的安全反应。在复杂人机交互特别是多点接触交互作业过程中,存在诸多不确定因素,碰撞检测是未来人机友好安全互助机械臂拟要解决的关键问题。
机械臂在任何给定的狭小工作空间中发生不可避免碰撞时碰撞检测的及时性与反应策略的有效性,非预测环境下人与机械臂之间的碰撞检测技术的突破,以及碰撞检测后机械臂作业反应的变换,对实现人机互助机械臂的安全性、友好性和协作性尤为重要。
大家都在看
-

卢旺达资深媒体人尤金·乌伊马纳:每次回头,都会发现中国坚定地站在我们身后 在西方主流媒体的叙事中,非洲往往与战乱、贫困、落后挂钩,而中非之间互利共赢的合作也常被戴上有色眼镜肆意曲解。 借复旦大学国际关系与公共事务学院“研究生国际暑期学校”访华的机会,本期我们邀请来沪的非洲资 ... 机械之最07-30
-

罗敏敏:不向年轻人灌输成功学,“幸福其实是一种幻觉” ·今天我们感受到的很多痛苦,正是古老的大脑面对日新月异的世界时的“适应不良”。人的大脑重约2斤8两,功率相当于一个20瓦的小灯泡。但它足以让你痛苦,也足以让你幸福。作为北京脑科学与类脑研究所所长,罗敏敏“ ... 机械之最07-30
-

不识字也不懂带货,一个被三十万“儿女”簇拥的母亲 五十九岁的农村妇女李杨氏不识字,但互联网记住了她对着镜头高喊“人过留名,雁过留声,辉煌靠自己”的强悍模样。2026年3月10日到14日,她一连发了四十七条视频,镜头里是一张哭得通红、长期熬夜而浮肿的脸,她反复 ... 机械之最07-30
-
从中国出发丨19年间,共2.09万名东盟学子选择留学贵州 2026年7月,泰国姑娘瑞玉兰刚刚结束在贵州轻工职业大学的汉语课程,即将回国入职一家中泰合资的家具进出口企业。“在中国的求学经历,让我更加理解两国商业文化的异同,我希望成为中泰经贸往来的使者。”她这样描述 ... 机械之最07-30
-

了解吉林的另一种“读本”(行天下) 游客参观吉林官参局博物馆。吉林市京剧出科博物馆。游客在吉林市博物馆参观。 本文图片均由赵 阳摄1988年冬天,绿皮火车载着50多名刚刚入伍的士兵,从黑龙江的边远山区驶入位于北国江城吉林省吉林市哈达湾的军营。就 ... 机械之最07-30
-

走出“逆生长”焕新路(老字号焕新记) 铜锅里,胶汁咕嘟翻涌。贾善俭持铲探入锅中,手腕微沉,轻轻一挑,稠润的胶液沿铲边垂落,凝而不坠,透亮如珀,铺成一面舒展的薄旗。在山东聊城东阿阿胶股份有限公司(以下简称“东阿阿胶”),这道名为“挂旗”的工序 ... 机械之最07-29
-

中国培育更多“国家级零碳工厂” 安徽省芜湖市繁昌区荻港镇,工人在奇瑞(繁昌)零碳产业园项目标准化厂房建设现场施工作业。 肖本祥摄(人民视觉)天津港“智慧零碳”码头深度融合5G、北斗、AI等前沿技术,搭载风电、分布式光伏系统,年发电量约6000万 ... 机械之最07-29
-

中国科技创新秉持开放包容、互利共赢理念(国际论坛) 科技创新,是数字时代驱动经济增长的重要支撑。研发产出前沿科技知识,创新将知识转化为具备市场价值的产品、服务与工艺流程,高新技术则全面重塑生产、消费与全球贸易形态。三者形成正向循环,持续提升生产效率、产 ... 机械之最07-29
-

燕山大学机械工程及其自动化,同宿舍4人毕业4年真实现状 都说燕山大学的机械是王牌专业,双非里面名气很大,就业率看着很漂亮。但光鲜的名头之下,普通本科毕业生,到底过得怎么样? 下面是一个普通四人宿舍的真实纪实,没有学霸逆袭,也没有极端惨例,就是机械本科生最常 ... 机械之最07-29
-

何以跨越山海 朱永新(右)和马马杜·阿马杜·利在交流。 苏州市新教育研究院供图图由AI辅助生成受访人:朱永新 中国新教育实验发起人、教育家马马杜·阿马杜·利 塞内加尔教育家2026世界人工智能大会不久前在上海召开。新一轮科技 ... 机械之最07-29
相关文章
- 儿童食玩安全标准应坚持就高不就低
- 何以跨越山海
- 别只知道圆周率!真实的祖冲之,才是中国古代最被低估的全能天才
- 机械应届生最容易踩坑的5类岗位,毕业别瞎选
- AI炼化 “邪修”万物 人类“丰容”青年社交涌现新“热词”
- 50年后再访唐山:经历过地震那个夜晚的人,如今怎么样
- 带着上下游,人形机器人加速跑起来(经济聚焦·走进“中国智造”)
- “恐龙之乡”+“千年盐都”:自贡的发展只靠运气好、挖到宝?
- 守望相助是最坚固的堤坝(暖闻热评)
- 拆解藏在太阳光芒里的谜题(弘扬科学家精神)
- 智谱的万亿市值,是一场稀缺性幻觉?
- 1935年,中国花重金买下5000挺捷克机枪,验收人员被禁止进车间
- 国际秩序变革的域外认知图景辨析—— 国外政要学界关于当代秩序变革的观点述评
- 甘肃3年来大力实施“县中振兴”工程——从“一枝独秀”到“多点开花”
- 全网厌恶AI脸,但这个被裁掉的女孩绕过了“恐怖谷”
- “彰显了委中历久弥坚的情谊”
- 存储龙头长鑫科技带旺一片生态 合肥跑出千亿产业集群
- 世界杯打完,未来十年足坛新四大天王基本锁定:1、哈兰德(终结机器),2、姆巴佩(速度之王),3、贝林厄姆(全能战神)...
- 我看透了:机器从不会彻底取代我们
- 机械原理挂科率60%?这3个概念坑了无数人
热门阅读
-
 1
天下第一暗器暴雨梨花针,传说中的唐门暗器做出来了 07-13
1
天下第一暗器暴雨梨花针,传说中的唐门暗器做出来了 07-13 -
 2
汽车投诉排行榜前十名汽车 问题最多的就是这些车 07-13
2
汽车投诉排行榜前十名汽车 问题最多的就是这些车 07-13 -
 3
世界上最牛挖掘机,甚至可以挖穿一座城市 11-05
3
世界上最牛挖掘机,甚至可以挖穿一座城市 11-05 -
 4
世界最大核潜艇制造厂,产量远超中美法 11-20
4
世界最大核潜艇制造厂,产量远超中美法 11-20 -
 5
5
-
 6
6
-
 7
7
-
 8
8